![[Jess]](jess.gif)
19. The Rete Algorithm
19.1. Disclaimer
The information in this Section is provided for the curious reader. An understanding of the Rete algorithm may be helpful in planning rule-based systems; an understanding of Jess's implementation probably will not. Feel free to skip this section and come back to it some other time. You should not take advantage of many of the Java classes mentioned in this section. They are internal implementation details and any Java code you write which uses them may well break each time a new version of Jess is released.19.2. The Problem
Jess is a rule engine. In the simplest terms, this means that Jess's purpose it to continuously apply a set of if-then statements (rules) to a set of data (the working memory). You define the rules that make up your own particular rule-based system. Jess rules look something like this:
Jess> (defrule library-rule-1
(book (name ?X) (status late) (borrower ?Y))
(borrower (name ?Y) (address ?Z))
=>
(send-late-notice ?X ?Y ?Z))
Library rule #1: If a late book exists, with name X, borrowed by someone named Y and that borrower's address is known to be Z then send a late notice to Y at Z about the book X.
19.3. The Solution
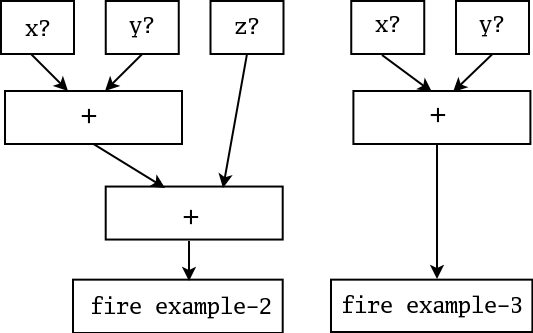
Jess instead uses a very efficient method known as the Rete (Latin for net) algorithm. The classic paper on the Rete algorithm ("Rete: A Fast Algorithm for the Many Pattern/ Many Object Pattern Match Problem", Charles L. Forgy, Artificial Intelligence 19 (1982), 17-37) became the basis for a whole generation of fast rule engines: OPS5, its descendant ART, CLIPS, and of course Jess. In the Rete algorithm, the inefficiency described above is alleviated (conceptually) by remembering past test results across iterations of the rule loop. Only new facts are tested against any rule LHSs. Additionally, as will be described below, new facts are tested against only the rule LHSs to which they are most likely to be relevant. As a result, the computational complexity per iteration drops to something more like O(RFP), or linear in the size of working memory. Our discussion of the Rete algorithm is necessarily brief. The interested reader is referred to the Forgy paper or to Giarratano and Riley, "Expert Systems: Principles and Programming", Second Edition, PWS Publishing (Boston, 1993) for a more detailed treatment. The Rete algorithm is implemented by building a network of nodes, each of which represents one or more tests found on a rule LHS. Facts that are being added to or removed from the working memory are processed by this network of nodes. At the bottom of the network are nodes representing individual rules. When a set of facts filters all the way down to the bottom of the network, it has passed all the tests on the LHS of a particular rule and this set becomes an activation. The associated rule may have its RHS executed (fired) if the activation is not invalidated first by the removal of one or more facts from its activation set. Within the network itself there are broadly two kinds of nodes: one-input and two-input nodes. One-input nodes perform tests on individual facts, while two-input nodes perform tests across facts and perform the grouping function. Subtypes of these two classes of node are also used and there are also auxilliary types such as the terminal nodes mentioned above. An example is often useful at this point. The following rules:(defrule example-2 (defrule example-3
(x) (x)
(y) (y)
(z) => )
=> )
19.4. Optimizations
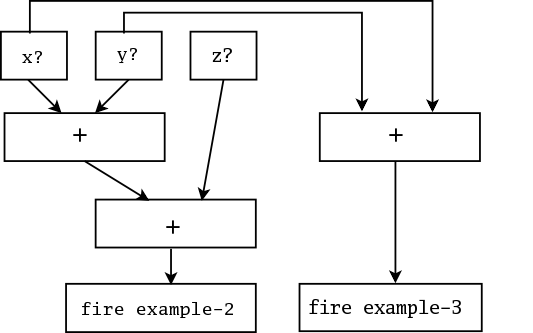
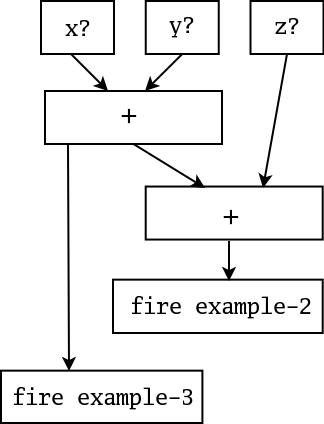
There are two simple optimizations that can make Rete even better, The first is to share nodes in the pattern network. In the network above, there are five nodes across the top, although only three are distinct. We can modify the network to share these nodes across the two rules (the arrows coming out of the top of the x? and y? nodes are outputs):
example-2: +1+1+1+1+1+1+2+2+t
example-3: =1=1=1=1=2+t
19.5. Implementation
Jess's Rete implementation is very literal. Different types of network nodes are represented by various subclasses of the Java class jess.Node: Node1, Node2, NodeNot2, NodeJoin, and NodeTerm. The Node1 class is further specialized because it contains a command member which causes it to act differently depending on the tests or functions it needs to perform. For example, there are specializations of Node1 which test the first field (called the head) of a fact, test the number of fields of a fact, test single slots within a fact, and compare two slots within a fact. There are further variations which participate in the handling of multifields and multislots. The Jess language code is parsed by the class jess.Jesp, while the actual network is assembled by code in the class jess.ReteCompiler. The execution of the network is handled by the class Rete. The jess.Main class itself is really just a small demonstration driver for the jess package, in which all of the interesting work is done.| The view command is a graphical viewer for the Rete network itself; I have used this as a debugging tool for Jess, but it may have educational value for others, and it may help you to design more efficient systems of rules in Jess. Issuing the view command after entering the rules example-2 and example-3 produces a very good facsimile of the drawing (although it correctly shows the larger number of one-input nodes). The various nodes are color-coded according to their roles in the network; Node1 nodes are red; Node2 nodes are green; NodeNot2 nodes are yellow; and Defrule nodes are blue. The orange node in the figure is a "right-to-left adapter" node; one of these is always used to connect the first pattern on a rule's LHS to the network. Passing the mouse over a node displays information about the node and the tests it contains; double-clicking on a node brings up a dialog box containing the same information (for join nodes, the memory contents are also displayed, while for Defrule nodes, a pretty-print representation of the rule is shown). See the description of the view function for important information before using it. |
|
19.6. Efficiency of rule-based systems
Jess's rule engine uses an improved form of a well-known algorithm called Rete (Latin for "net") to match rules against the working memory. Jess is actually faster than some popular rule engines written in C, especially on large problems, where performance is dominated by algorithm quality.
Note that Rete is an algorithm that explicitly trades space for speed, so Jess' memory usage is not inconsiderable. Jess does contain some commands which will allow you to sacrifice some performance to decrease memory usage. Nevertheless, Jess' memory usage is not ridiculous, and moderate-sized programs will fit easily into Java's default 16M heap.
The single biggest determinant of Jess performance is the number of partial matches generated by your rules. You should always try to obey the following (sometimes contradictory) guidelines while writing your rules:
- Put the most specific patterns near the top of each rule's LHS.
- Put the patterns that will match the fewest facts near the top of each rule's LHS.
- Put the most transient patterns (those that will match facts that are frequently retracted and asserted) near the bottom of a LHS.
You can use the view command to find out how many partial matches your rules generate. See this chapter on How Jess Works for more details.